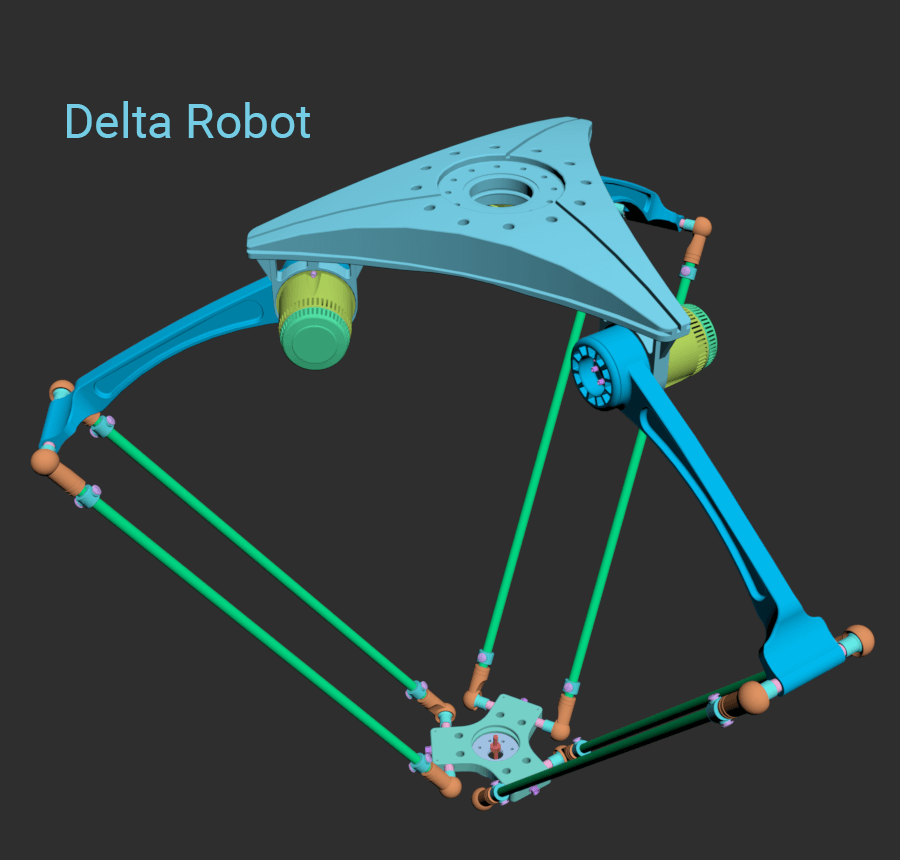
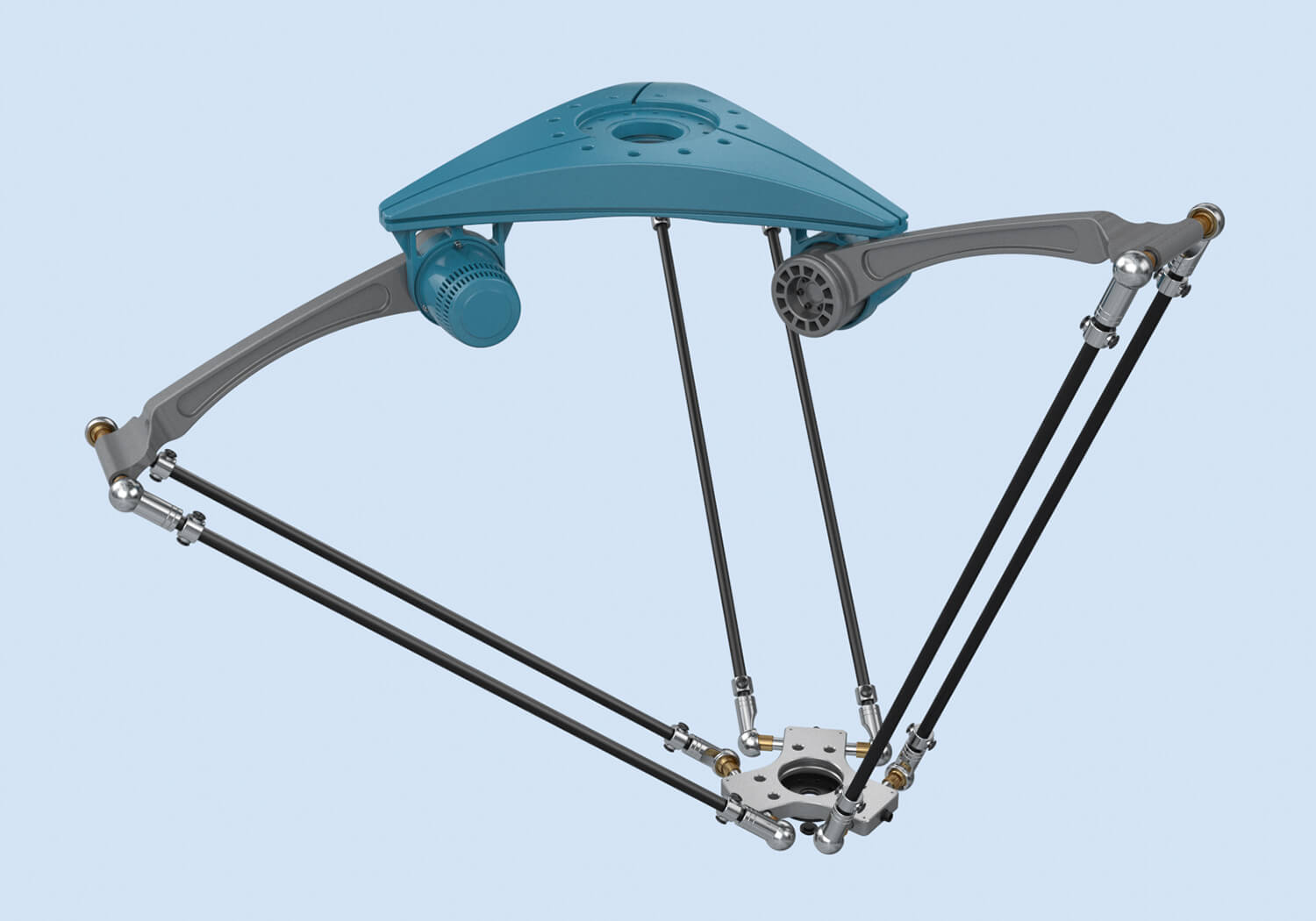
Delta Robot 並聯式機器手臂
Delta Robot 並聯式機器手臂、平行連桿,使用 3ds max Bones HI Solver 解算器 History-Independent 依賴 Bones 鏈的末端配合 IK Chain 位置的移動,解算出旋轉的角度。但是當前型式 Actuating Arm 驅動臂只能處於 Y 軸的旋轉,需要限制旋轉方向。
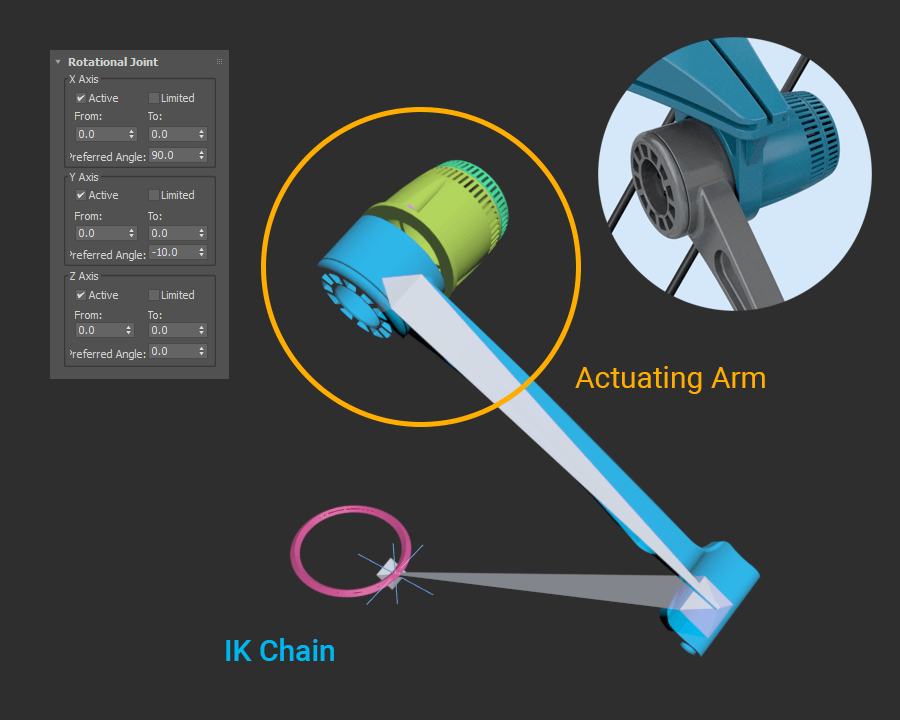
Actuating Arm Axis Limit 軸向限制
使用 3ds max Bone 骨骼 IK Chain 解算器
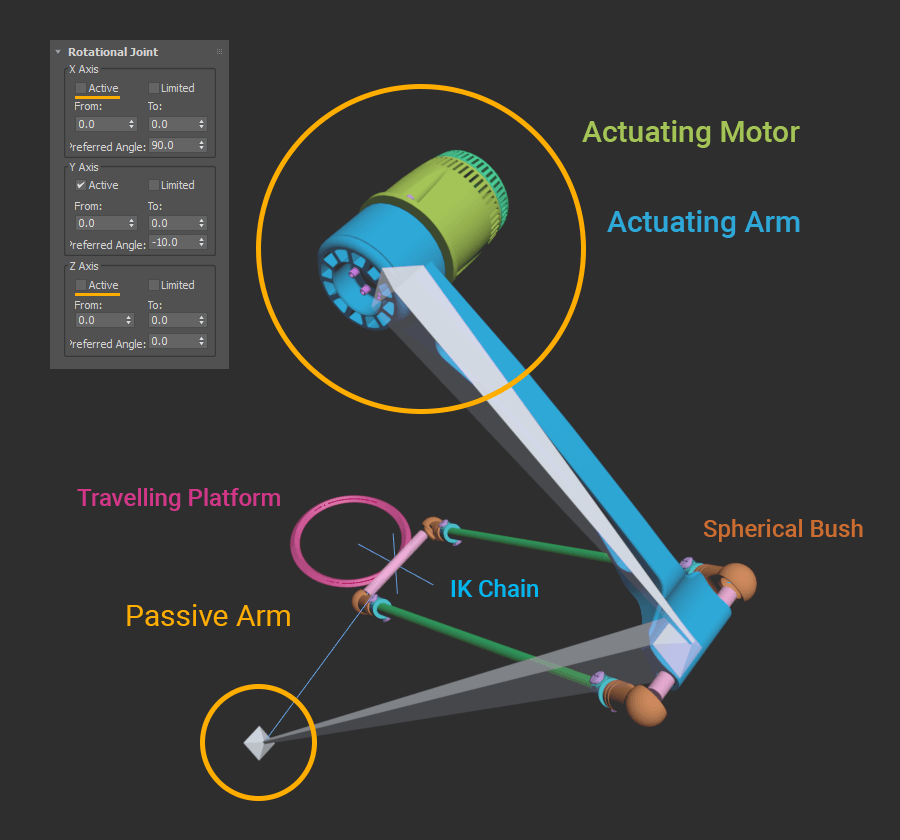
限制 X 及 Y 旋轉方向,解算器 IK Chain 位置則不正確,並聯式機器人 Passive Arm 被動臂則需要另外加一組 Bones 骨骼。
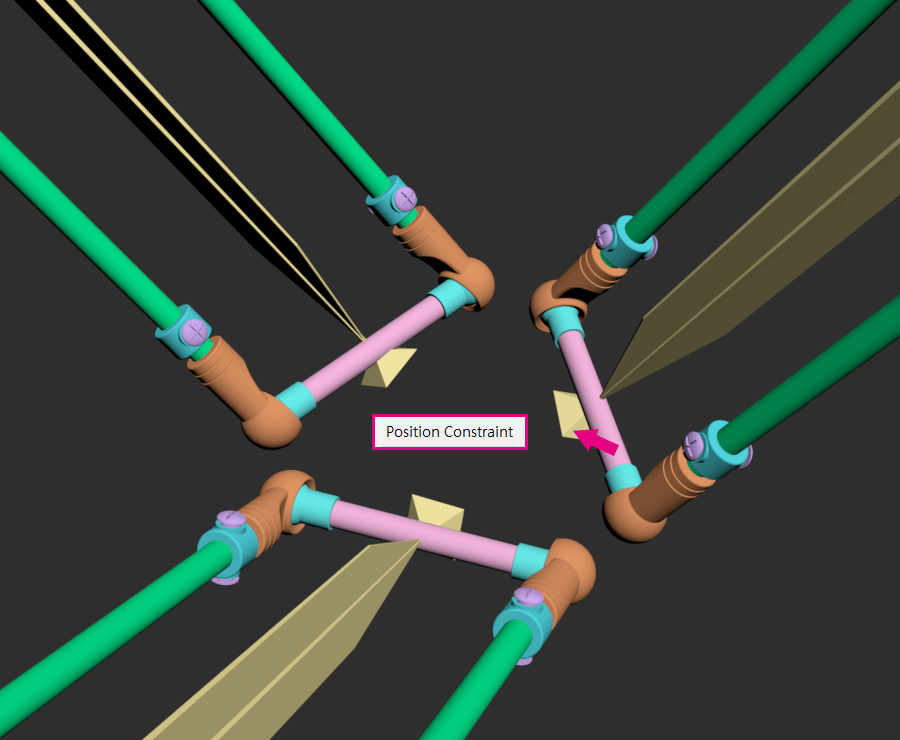
Position Constraint 位置約束
依據 Target 目標物件的 Position 位置的 Weight 加權平均位置進行定位。
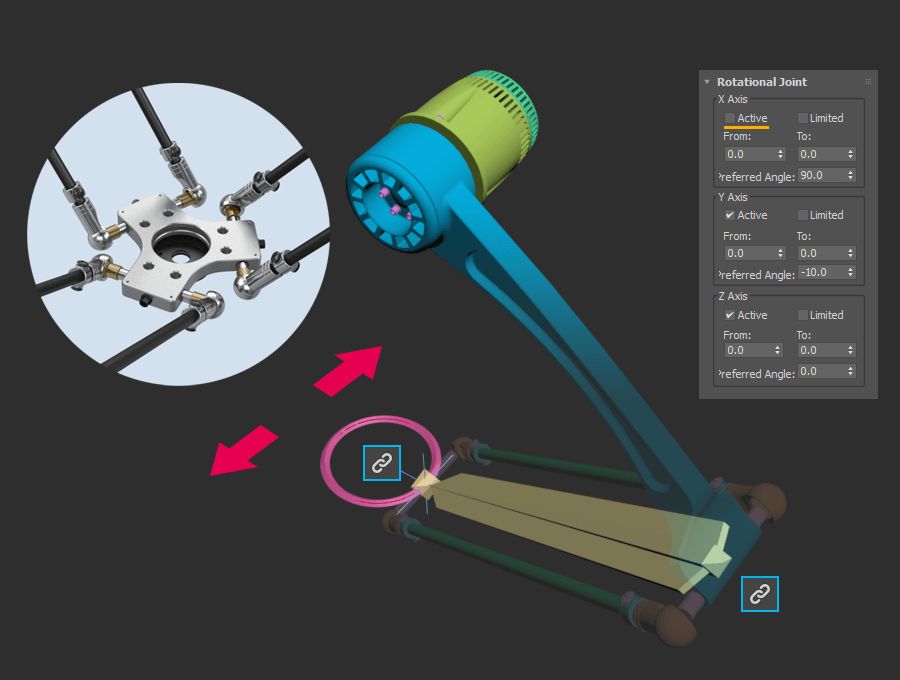
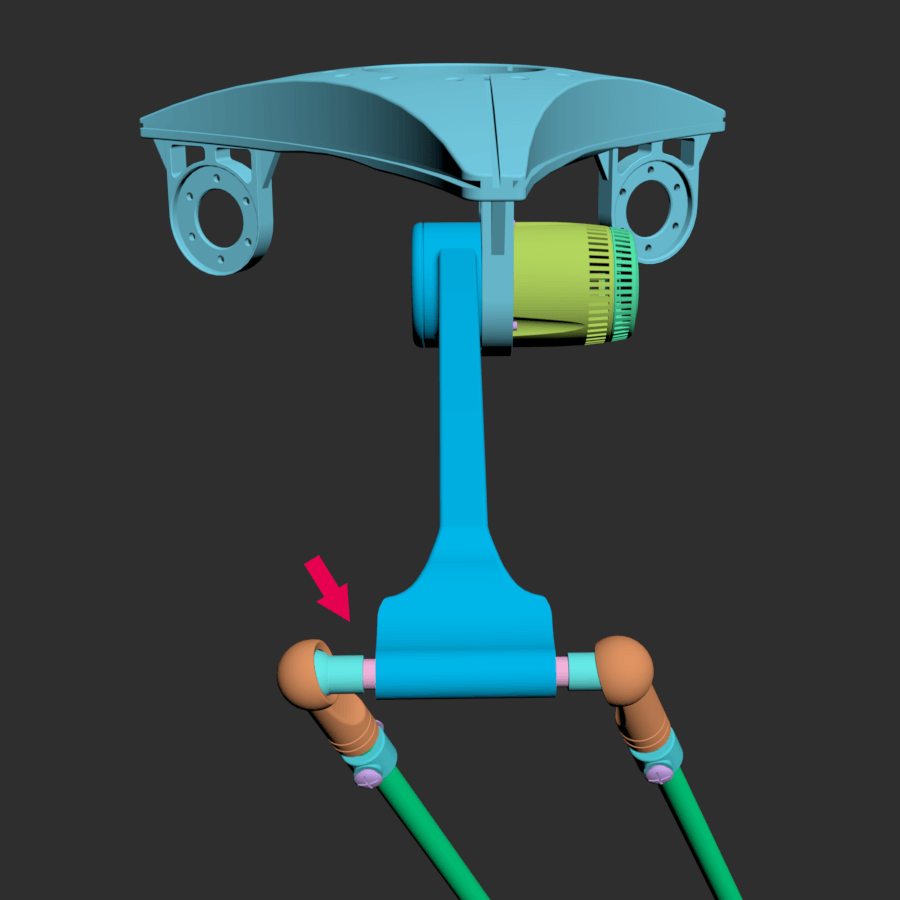
外加的一組 Bones 骨骼,需要限制 X 旋轉方向,只有兩節並且挷定於 Passive Arm 被動臂兩端上方仍然只能處於 Y 軸的旋轉,方向是以 Spherical Bush 球形襯套固定,是為了解決下方球形襯套 LookAt Constraint 的平行連桿機構方向跟蹤。
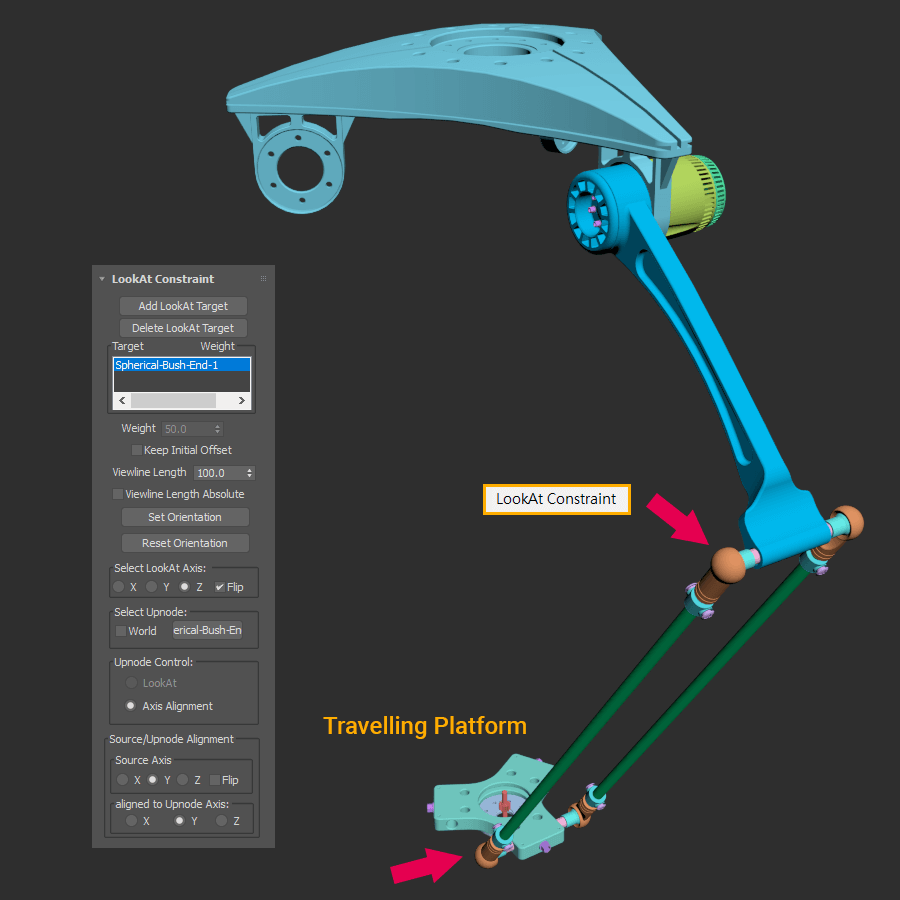
雖然 Position Constraint 球形襯套位置約束有跟上角度但是 Travelling Platform 會出現孔位拉扯問題。將其多關節機器人,驅動臂、被動臂再克隆且各別旋轉 120 度組合成 Delta Robot 三軸機械手臂。
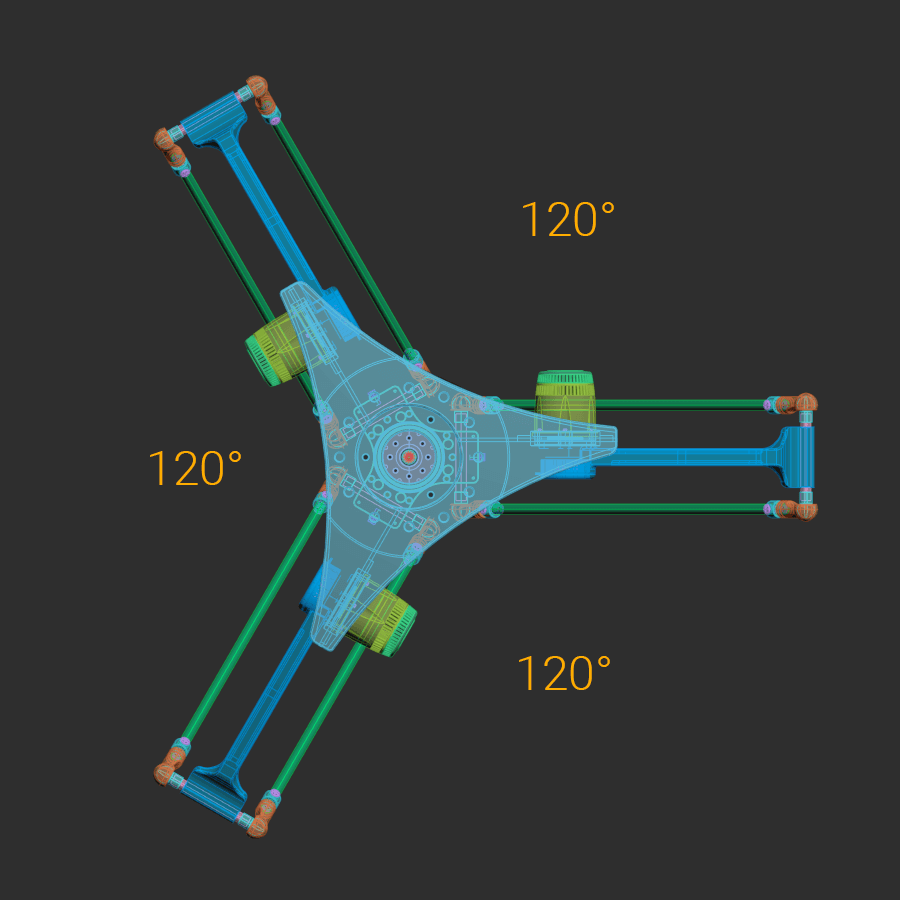
三軸機械手臂 3D 自動化的產業呈現
Delta Robot 三軸機械手臂、自動化的產業 Delta Robot 並聯式機械手臂又稱做 Parallel Robot 機械手臂(三角機器人)即時追蹤,機械加工自動上下料解決方案、包裝分類、電子組裝、電子半導體、微型零件自動化等解決方案,採用工程塑膠和鋁製部件,精確的動作、低慣性,為產線自動化與工廠智慧化發展之、高定位精度與高速性能。

自動化解決方案,通過使用 3D Render 著色應用
產品自動化的生產過程中,設備的應用表達方案是一個關鍵的環節,它可以幫助客戶更好了解產品的功能和優勢,可以執行各種複雜的操作,如搬運、裝卸、組裝和校正,提高生產精度、生產效率和靈活性。為了更好地展示機械手臂的性能和特點,使用 3D Render 著色應用來製作其動態影片。根據實際的機械手臂模型和材質效果,設計出各種不同的工作環境場景和動作,使其更加逼真和生動。可以通過動態影片展示機械手臂在不同的工業環境中的運作情況,以及其與其他設備的協同產品設備應用,更直觀地感受到其優異的性能。提高自動化解決方案市場競爭力。